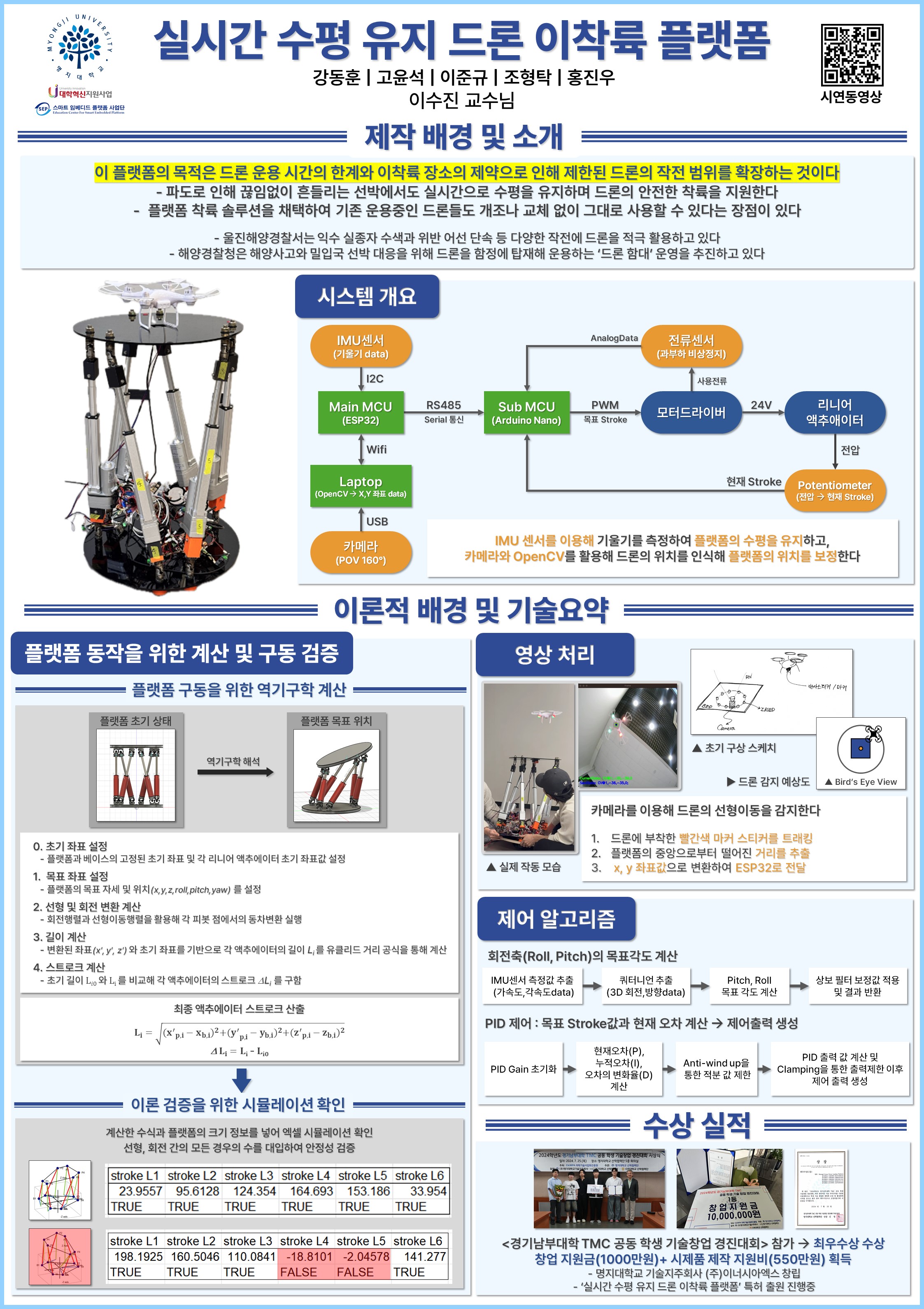
[융합캡스톤디자인] 4조 : 실시간 수평 유지 드론 이착륙 플랫폼
- 작성일2024.11.18
- 수정일2024.11.29
- 작성자 e***ms
- 조회수294

팀원 : 고윤석, 이준규, 조형탁, 홍진우, 강동훈 / 지도교수 : 기계공학과 이수진 교수
- 첨부파일
- 첨부파일이(가) 없습니다.
- 다음글
-
[융합캡스톤디자인] 3조 : 기관내의 보안 문서 배달 로봇 : SLAM & Navigation 기반e***ms 2024-11-18 11:33:11.0
- 이전글
-
[융합캡스톤디자인] 5조 : AI 자동 세차 시스템e***ms 2024-11-18 11:31:27.0